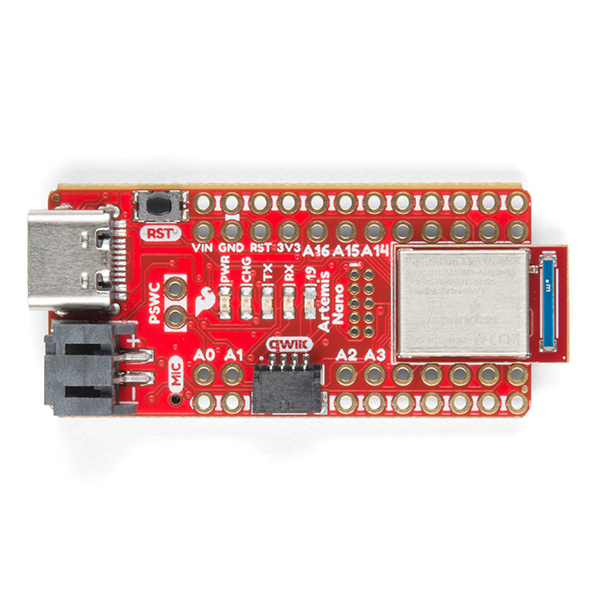
Lab 1 - Artemis and Bluetooth
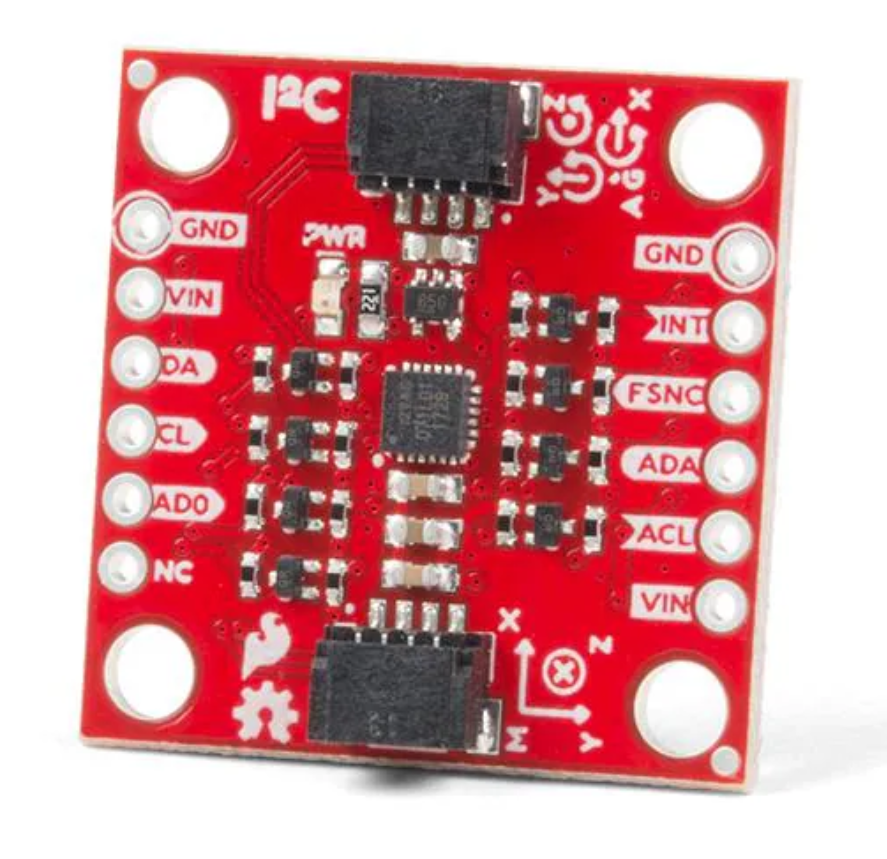
Lab 2 - IMU
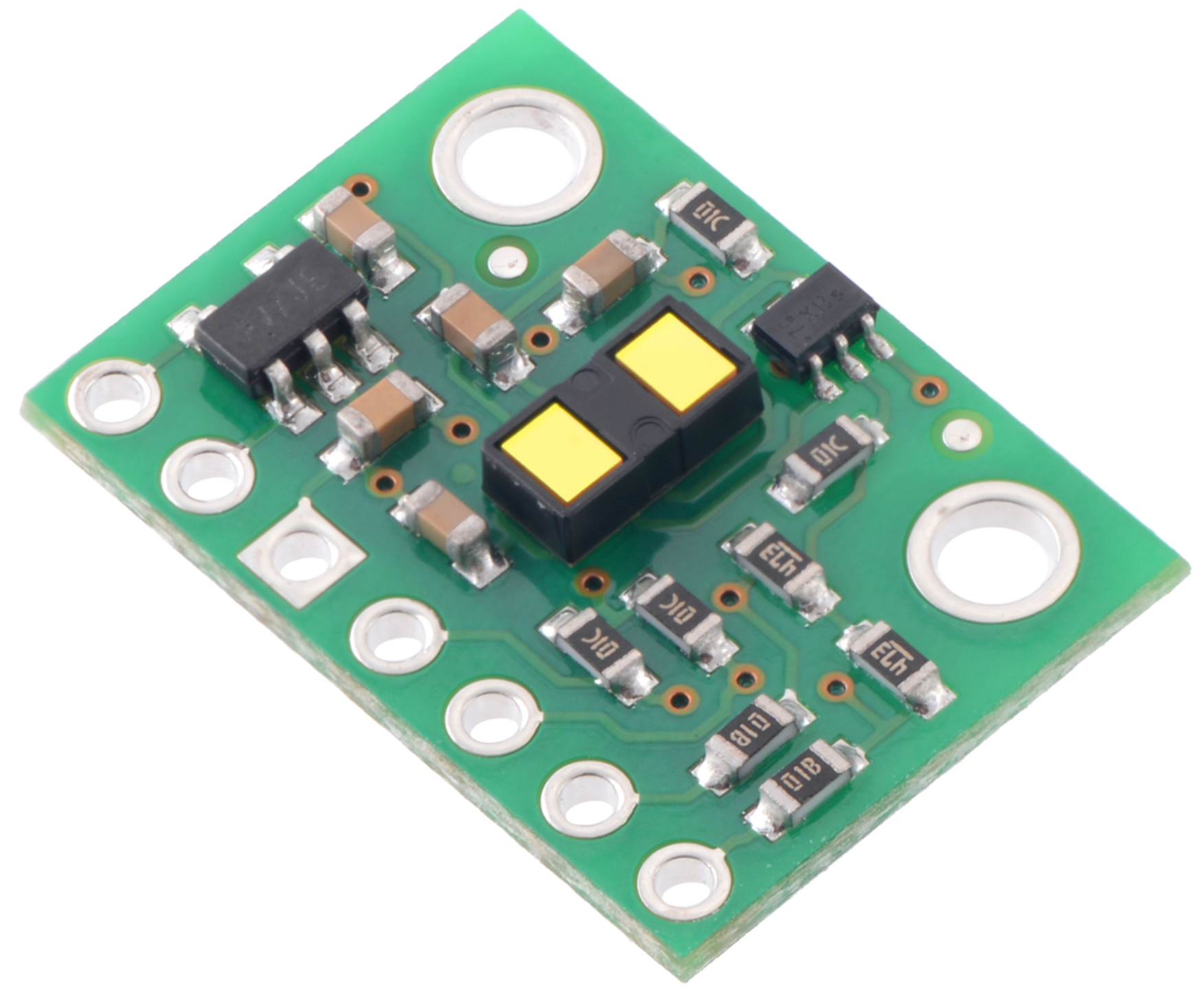
Lab 3 - Time of Flight Sensors
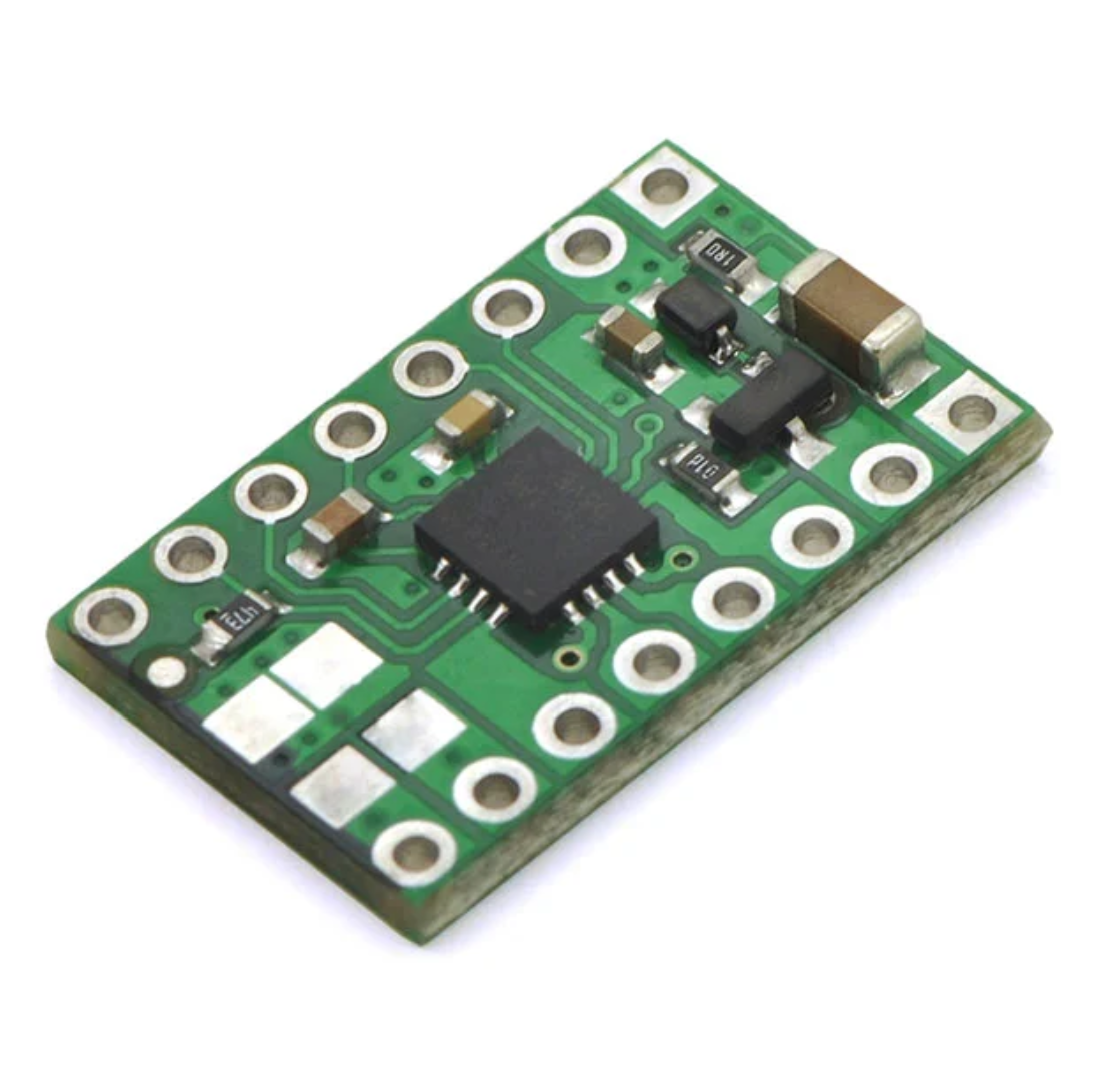
Lab 4 - Motors and Open Loop Control
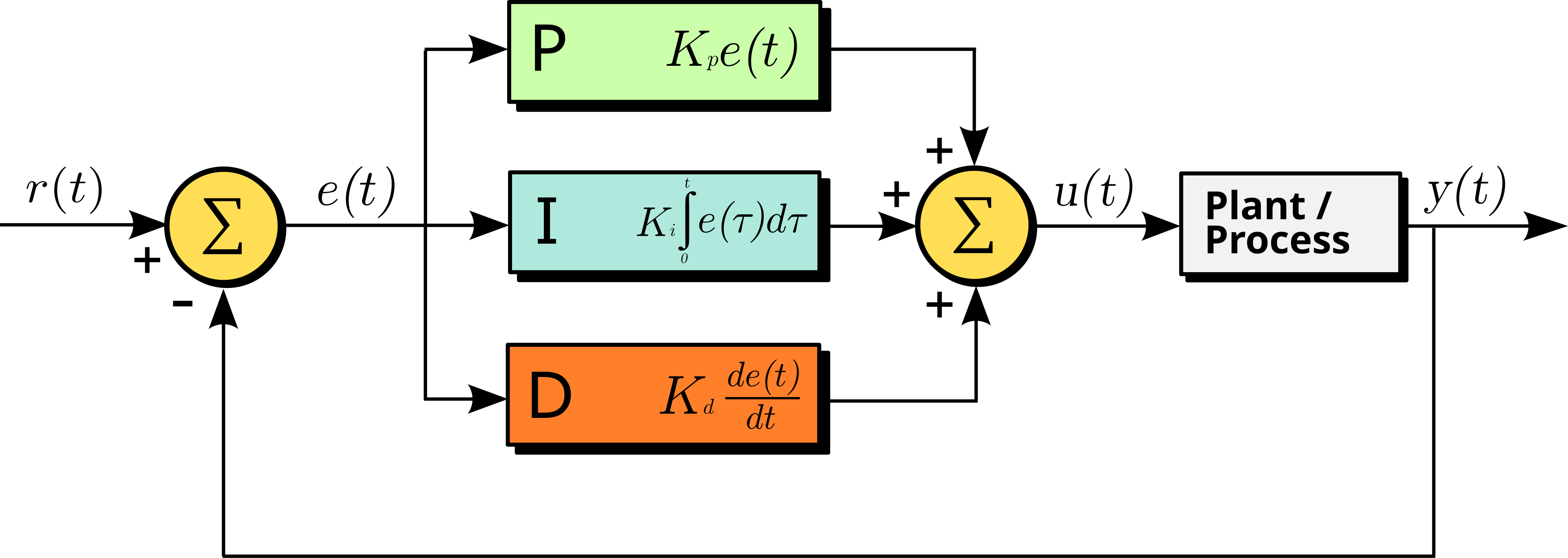
Lab 5 - Linear PID
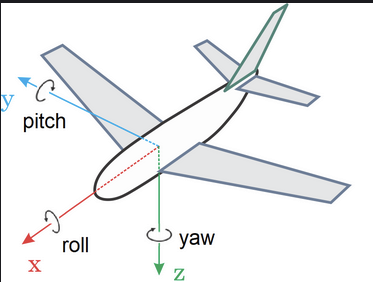
Lab 6 - Orientation Control
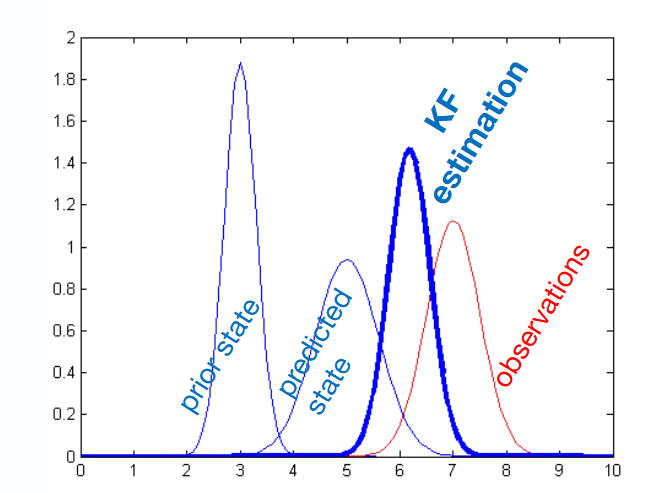
Lab 7 - Kalman Filter
Lab 8 - Stunts
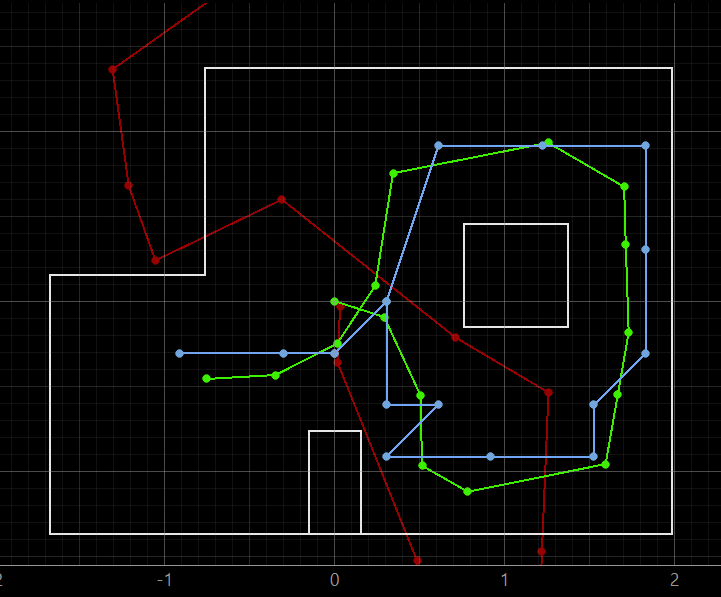
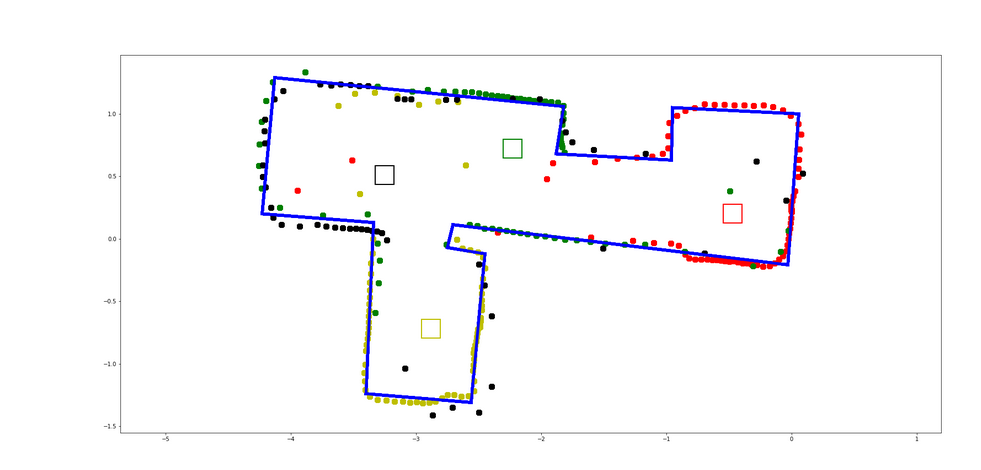
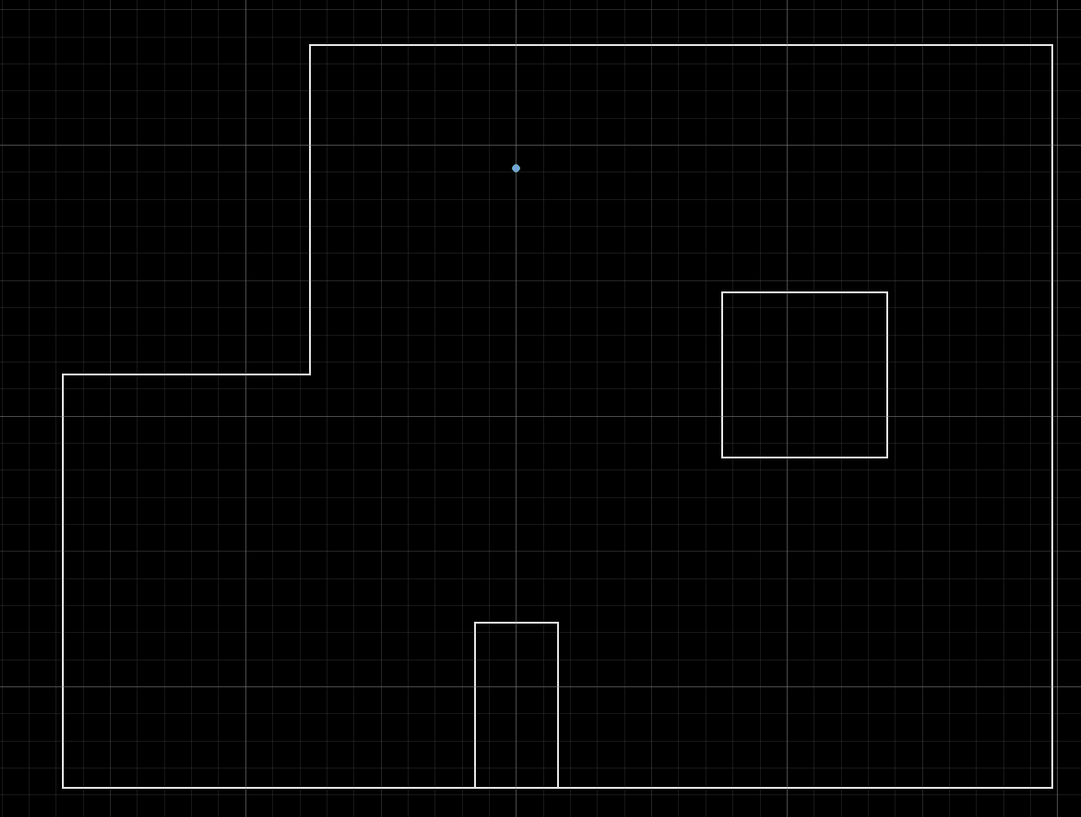
Lab 9 - Mapping
Lab 10 - Grid Localization using Bayes Filter
Lab 11 - Localization on the Real Robot
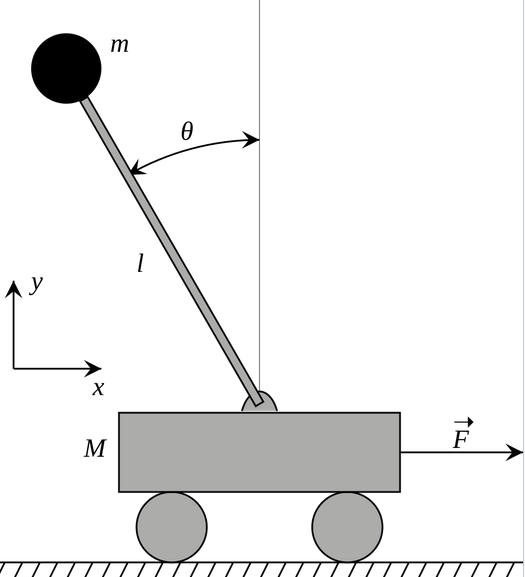
Lab 12 - Inverted Pendulum